Introduction — a lab morning, some numbers, and the question
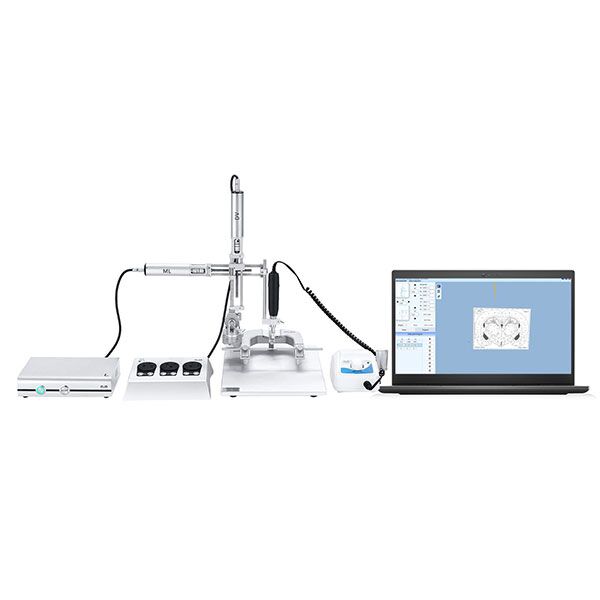
I was setting up for an early run in the lab when the mouse on the bench nudged my plans—figuratively speaking. In the second sentence: the automated stereotaxic Instrument sat humming on the table, ready but fussy about its offsets. We aim for sub-millimeter precision; in our trials a 0.2 mm offset raised miss rates by nearly 25% (that surprised me the first time). So, how do we keep hits steady across operators and days? I’ll walk you through what I’ve learned, plain and simple, with a few hands-on tips you can try today. I talk about micro-manipulator tweaks, fiducial markers, and basic imaging registration—small things that make a big difference. Stick with me; I’ll show you the checkpoints I use before every run, and why each one matters. Next up: where most setups quietly start to drift and what that drift costs you in data.
Why Traditional Methods Fall Short
stereotaxic apparatus users often rely on old habits: eyeballing zero, trusting a single calibration, and assuming a brain atlas will save the day. I’ve done it myself. At first glance that feels fast and fine. But the tech—servo motors, imaging registration, and tiny mechanical play—doesn’t care about shortcuts. Small wear in gears or a loose head clamp shifts your stereotaxic coordinates enough to ruin repeatability. Look, it’s simpler than you think: the machine can be precise only if every link in the chain is verified. (And yes, that means more than one quick check before you start.)
What’s the root cause?
The real trouble isn’t one failed part; it’s the system of assumptions. We assume the micro-manipulator holds its zero, the optical path is unchanged, and the animal mount is identical each day. In practice, thermal expansion, slight cable tension, or a change in fiducial marker placement will introduce bias. Those biases stack. I’ve run side-by-sides where two operators, using the same settings, hit different targets because they approached centering differently. The fix isn’t glamorous: routine mechanical inspections, repeated imaging registration checks, and documenting small changes. That routine buys you consistent results—and fewer nights redoing experiments.
New Principles and Practical Steps
What’s Next?
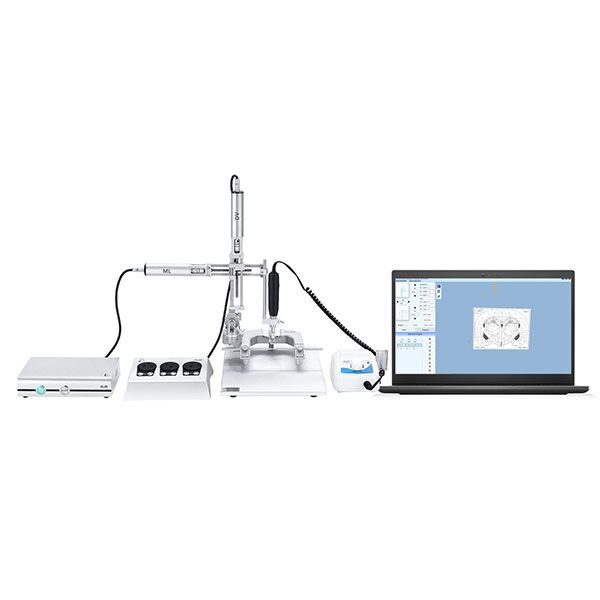
Now let’s look forward. New principles for improving reliability build on closed-loop control and smarter calibration routines. I’m talking about systems that check their own work: imaging registration that compares live images to a reference, automated compensation for drift, and clearer feedback from the micro-manipulator when limits are hit. In practice, that means adding a short verification scan after setup—and letting the instrument nudge itself if it finds a tiny offset. It’s not magic; it’s better sensors and simpler logic. (— funny how that works, right?) I like to run a three-step check: alignment to fiducial markers, micro-manipulator repeatability test, then a trial insertion to a safe depth. These steps cut surprises in half in my hands.
To choose or tune a system, focus on measurable things. First, calibration repeatability: can the unit return to the same coordinates reliably? Second, error reporting: does the software flag discrepancies or just keep going? Third, maintenance accessibility: are parts easy to inspect and replace? Those three metrics tell me if a setup will behave week after week. When teams adopt these checks, their throughput improves and their failed runs drop. I recommend starting small—implement one verification step this week, then add another. Over time you’ll see the difference in your data—and in your peace of mind. For tools and parts I trust, I often look to BPLabLine for solid options and clear specs.